


概要 M5Stickシリーズの最新作であるM5StickS3が発売されました。色がオレンジ系から初代やV系のグレーに変更になっています。 ESP32-S3に変更され、電源周りも大きく変わっていますので使い方の確認をしていきたいと思います。 製品 https://www.switch-science.com/products/10921 上記の製品となります。価格は過去のM5Stickシリーズと大き ...
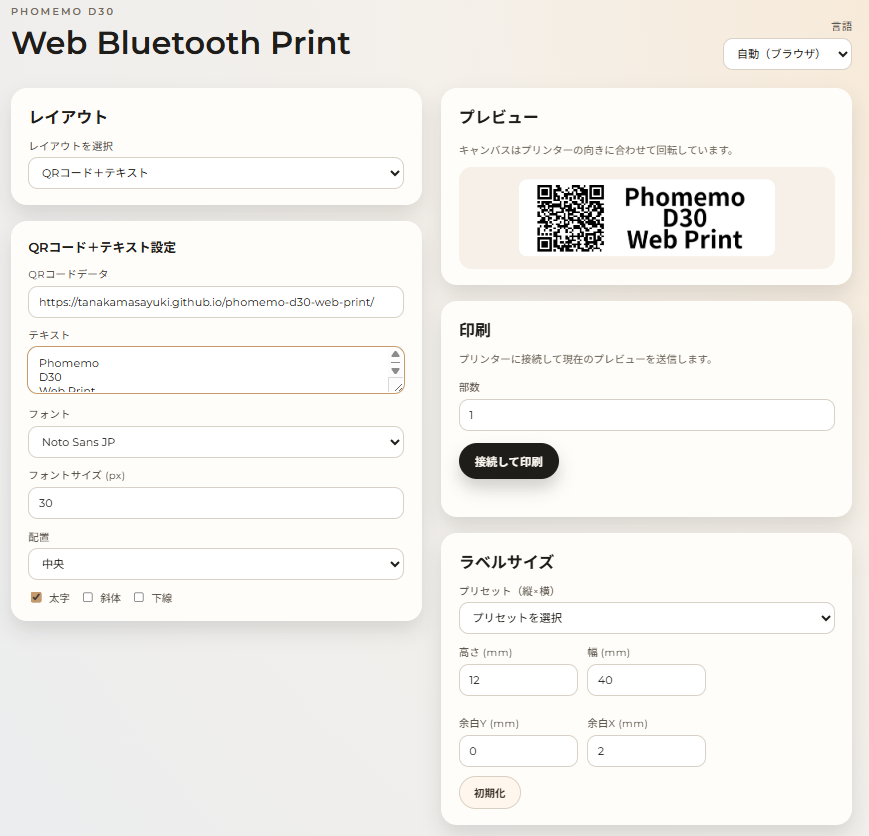
概要 https://lang-ship.com/blog/work/label-printer/ Phomemo D30は非常に便利なプリンターなのですが、アプリがスマホ向けしかありません。通常パソコンを利用して作業をしているので、パソコンから利用できるアプリがないか調べたところ、ブラウザからWeb Bluetoothを利用して印刷するサンプルがあったので、自分でも作成してみました。 作成物 h ...

概要 定期的に安いマイコンを探していて、自作基板とかのちょっとした制御に使いたいと思っています。いろいろ探していたのですが、価格よりは新しいものに手を出さない方がいいかなと思いESP32シリーズでまとめる予定です。 CH32V003(1枚100円前後) https://ja.aliexpress.com/item/1005006781371488.html 一番安い価格帯だとCH32V003だと思 ...

概要 ESP32はマルチコアで、FreeRTOSを搭載しているのでマルチタスクでプログラムを実行できます。しかしながら最初はちょっと概念の理解が大変なので、単純にマルチタスクが使えるライブラリを作ってみました。 マルチタスクとは? https://lang-ship.com/blog/work/esp32-freertos-l01-about/ 上記に過去にまとめた記事がありますが、マルチタスクを ...

概要 https://lang-ship.com/blog/work/sesame5/ 2024年12月に購入してから1年以上利用しましたので、長期レビューと現状の構成を紹介したいと思います。概ね満足なのですが、少し気になる点が残っている状態です。 だれにでも薦めることは微妙なのですが、自宅だとなくてはならない存在になっています。 SESAME 5 → 故障 → 修理 → もう片方故障 → Pro ...

概要 Windows11が動くPCで気軽に初期化できるものが欲しく、ミニPCを買おうと思っていたのですが画面付きのほうが楽かとノートPCを購入してみました。出荷時まで戻してからWindows11とUbuntuのデュアルブートにも成功しました。 購入物 結構古いですがLenovoのThinkPad X13 Gen1です。2020年モデルなのでリース落ちが結構出回っているモデルになります。 最初はミニ ...

概要 Arduino IDEだとバージョン番号の固定ができず、PlatformIOだとちょっと標準と違うのでArduinoプロジェクトの管理が面倒だったのですが、Arduino CLIの欠点であるコマンドラインが面倒なのをvscode用の拡張機能を作って低減してみました。 Arduino CLIとは? Arduino IDEの内部で利用されているビルドシステムです。Arduino IDEのエディタ ...

概要 https://lang-ship.com/blog/work/usb-ubuntu/ 少し前にUbuntuのLiveUSBに永続化用パーティションを追加して、USBブードできるUbuntu環境を作ってみましたが、今回はVentoyを利用して複数のISOファイルを指定して起動できるセキュアブート対応の環境を作ってみました。 VentoyはISOファイルを置くことで、インストール用メディアなど ...

概要 高くて手が出なかった超音波カッターを購入してみました。少し前は個人で購入できるものは日本産のものしかなく、3万円以上と高価なものばかりでした。今回は1万円前後と手頃なものがあったので購入。値段なりの働きはしてくれそうでした。 動画 商品の紹介動画を撮影しています。

M5Stack社の拡張用ユニットの使い方の説明動画です。 各ユニットの紹介は個別の動画で収録予定ですので、希望のユニットがあればリクエストください。 動画で利用しているスライドはこちらになります。

概要 https://lang-ship.com/blog/work/500-digital-loupe/ 過去に何個か手持ちのデジタルルーペを購入していますが、少し使いにくいものばかりだったですが、オートフォーカス付きのものがありましたので試してみました。 結果としては惜しいけれど、もうちょっと距離が欲しかったです。用途によっては使えると思いますが、次の世代に期待しています。 紹介動画とスライド ...

概要 https://lang-ship.com/blog/work/taobao-2025/ 前回のあとに追加で他のものを購入してみました。いろいろ見えてきたことがあるので、送料などの考えかたなどを紹介したいと思います。 送料について 最初の0.5キロまで追加0.5キロあたり菜鸟集运-空运-小型37元9元菜鸟集运-空运-带电60元15元菜鸟集运-空运-食品69元16元菜鸟直邮-空运-小型37元1 ...

概要 USBの電源ライン用の保護ICであるWCH CH217Kを試してみました。外付け抵抗によって過電流保護機能を中心に検証してみました。可変抵抗を利用することにより、0.4Aから1.2Aまで可変で過電流保護を動かすことができました。 製品 https://akizukidenshi.com/catalog/g/g129464 秋月電子さんでも取り扱いがあるICになります。過電流保護機能、過熱保護 ...

概要 M.2のSSDをあまり使ってこなかったのですが、面白そうなリーダーがあったので購入してみました。画面上にUSB2か3のどちらかで接続しているのかとS.M.A.R.T.の情報を表示してくれるものです。USB3で動いているかのチェックツールも欲しかったので購入してみました。 購入物 上記の製品になります。今見るとセール実施で安くなっていますが、日本への販売を停止しているようでした。 https: ...

概要 オシロスコープのプローブをICなどに固定する方法を少し検討してみました。手で抑えるのは長期的には難しいので、なんらかの固定方法があると便利だと思います。 手でがんばる 今回は手元にあったESP32のUSBシリアル変換のTX端子を確認してみました。オシロスコープを手で抑えるのは短時間だと問題ないのですが、長時間安定して固定するのは無理があると思います。 3Dプリンター製の簡易ポジショナー 昔に ...